Simple wireless communication between MicroPython boards via Bluetooth (BLE)
The hub-to-hub communication feature in Pybricks MicroPython is not restricted to LEGO hubs alone.
In this project, we will show you how to install a library that enables simple wireless communication between any number of MicroPython boards that support Bluetooth Low Energy (BLE).
If you just need to send small amounts of data, this can be a lot simpler than setting up dedicated connections between the boards.
How does it work?
Normally when you want to send data between two devices, you need to establish a connection first. One device can “advertise” itself to describe what it can do, and the other can “scan” for it.
This advertisement data normally contains information about the device, like its name and services. Once a scanning device finds an advertising device, they can connect and start sending data.
In the technique used here, we put the information we want to exchange in the advertisement data instead. There isn’t much space in the advertisement data, but it can be enough for simple messages. The advantage is that you don’t need to establish a connection at all, but you can just keep looking for changing advertising data and react to it.
We’ve made a library that does this for you, so you can simply send and receive values without worrying about the details of the Bluetooth protocol.
What can you make?
This technique works great for broadcasting a few numbers or a small text message. Since no explicit connection is required, any other BLE-enabled device can scan for these messages and react to them.
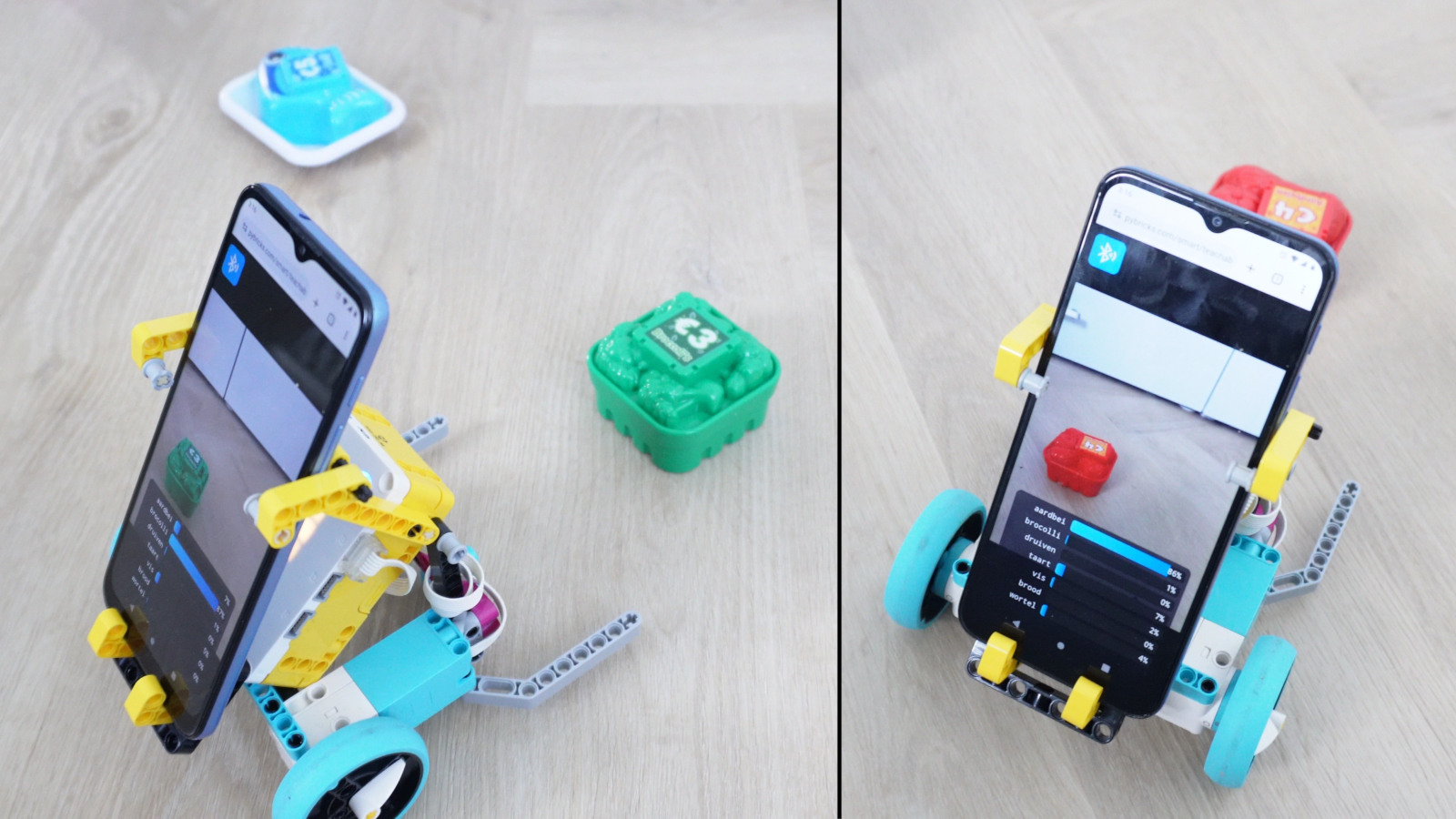
This lets you make many-to-many communication networks like the one shown below. Here, a LEGO hub measures a color and broadcasts it to all other boards in the area that may be listening, which is two Arduino Nano ESP32s in this case. They respond to the message by turning on the LED at the corresponding color.
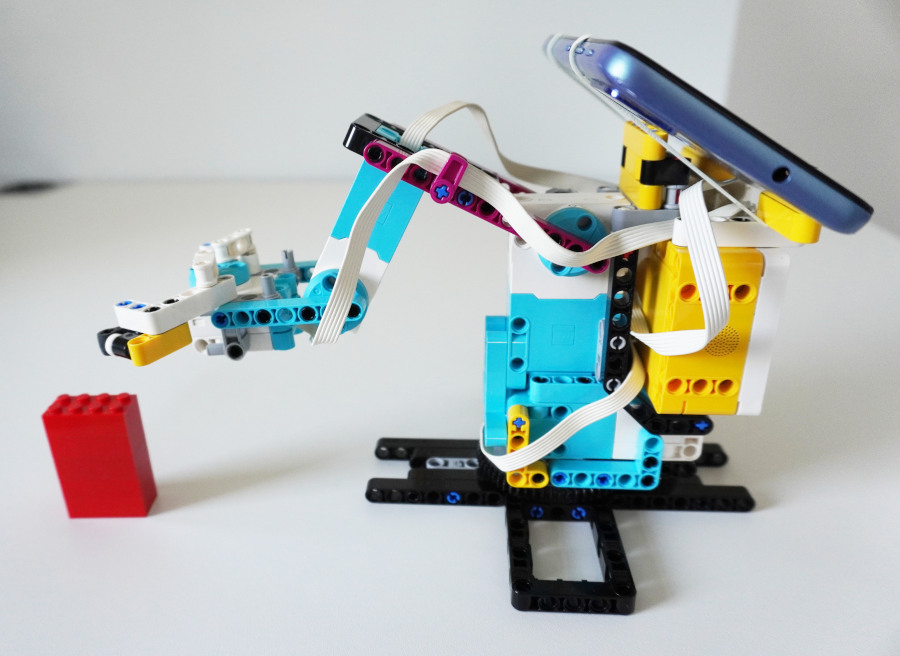
A similar example is shown below, where a LEGO hub broadcasts tilt and roll data, which is used by the Arduino Alvik robot to drive around.
Installing the bleradio module
The communication tools come pre-installed on the LEGO hubs running Pybricks.
If you want to use this technique with other MicroPython
boards, install the bleradio library first. If you have mpremote, just do:
mpremote mip install https://raw.githubusercontent.com/pybricks/micropython-bleradio/master/bleradio.py
Alternatively, download bleradio.py and copy it to your board.
What can you send?
Each hub can broadcast on one “channel” (0 through 255) and observe any number of channels (each 0 through 255). The channel numbers are used to filter out the messages you are interested in.
You can send signed integer values, floating point numbers, booleans, strings, or bytes. Or a list/tuple of these objects.
For example, you can broadcast one of the following:
data = 12345
data = "Hello, world!"
data = b"\x01\x02\x03"
data = (123, 3.14, True, "Hello World")
Boolean values are packed into one byte. All other types are packed into their respective sizes plus one byte for the type.
Since advertisements payloads are limited to 31 bytes by the Bluetooth spec and there are 5 bytes of overhead, the combined size of all type headers and values is limited to 26 bytes.
When no data is observed, the observe method returns None. To stop broadcasting, use broadcast(None).
The full specification is available in the protocol.
Example programs
Here is a simple example program that shows how to use the BLERadio class.
This example shows how you can broadcast data on on a channel and listen to
data on other channels at the same time.
from time import sleep_ms
from bleradio import BLERadio
# A board can broadcast small amounts of data on one channel. Here we broadcast
# on channel 5. This board will listen for other boards on channels 4 and 18.
radio = BLERadio(broadcast_channel=5, observe_channels=[4, 18])
# You can run a variant of this script on another board, and have it broadcast
# on channel 4 or 18, for example. This board will then receive it.
counter = 0
while True:
# Data observed on channel 4, as broadcast by another board.
# It gives None if no data is detected.
observed = radio.observe(4)
print(observed)
# Broadcast some data on our channel, which is 5.
radio.broadcast(["hello, world!", 3.14, counter])
counter += 1
sleep_ms(100)
You can make a variant of the program above and run it on a second board. For example, you can make a program that observes the data on channel 5 and prints it when it changes.
This example also shows the signal strength, which can be an additional piece of information to help you roughly determine the distance between the boards.
from bleradio import BLERadio
radio = BLERadio(observe_channels=[5])
old_data = None
while True:
new_data = radio.observe(5)
strength = radio.signal_strength(5)
if new_data == old_data:
continue
print(strength, "dBm:", new_data)
old_data = new_data
Check out the GitHub repository for more examples, details, and discussion.
Mixing with LEGO Hubs
This communication technique is included in Pybricks by default. This means you can use any existing program for inspiration.
It does not matter if the LEGO hub uses a Python program or a block-based program. Wireless communication works the same way in both cases.