Use your phone as a smart sensor
The sensors that come with your LEGO set are simple and effective, but they are limited in what they can measure. Did you know there’s a perfectly good sensor in your pocket?
In this chapter you’ll learn to use your phone as a smart sensor to add vision and intelligence to your creations.
you normally do.
on the hub.
values to the hub.
It's like a sensor.
This is a new feature: This project uses new beta features. Use Pybricks Beta to try it early. Just update the Pybricks firmware and create programs as usual!
Connecting your phone as a sensor
You’ll create programs on your tablet or computer as usual. It probably has a camera, but it would be very impractical to use on a mobile robot! Instead, you’ll connect your phone to the Spike Prime hub at the same time.
You can think of your phone as a wireless sensor. Your program can use the measured values in the same way as regular sensor values, as you learned previously. The hub runs your program all by itself, so you can also restart it without your computer nearby.
To connect, follow these steps as shown in the video below.
- On your computer or tablet, connect your Spike Prime hub with Pybricks as usual. Don’t start any programs yet.
- On your phone, choose one of the smart sensor applications.
- Press the Bluetooth button on the Spike Prime hub to make it blink again.
-
On the sensor page, connect using the Bluetooth button.
On Android, this works right away. On iPhone, use a free browser app that supports Bluetooth, such as Bluefy.
Using sensor values from your phone
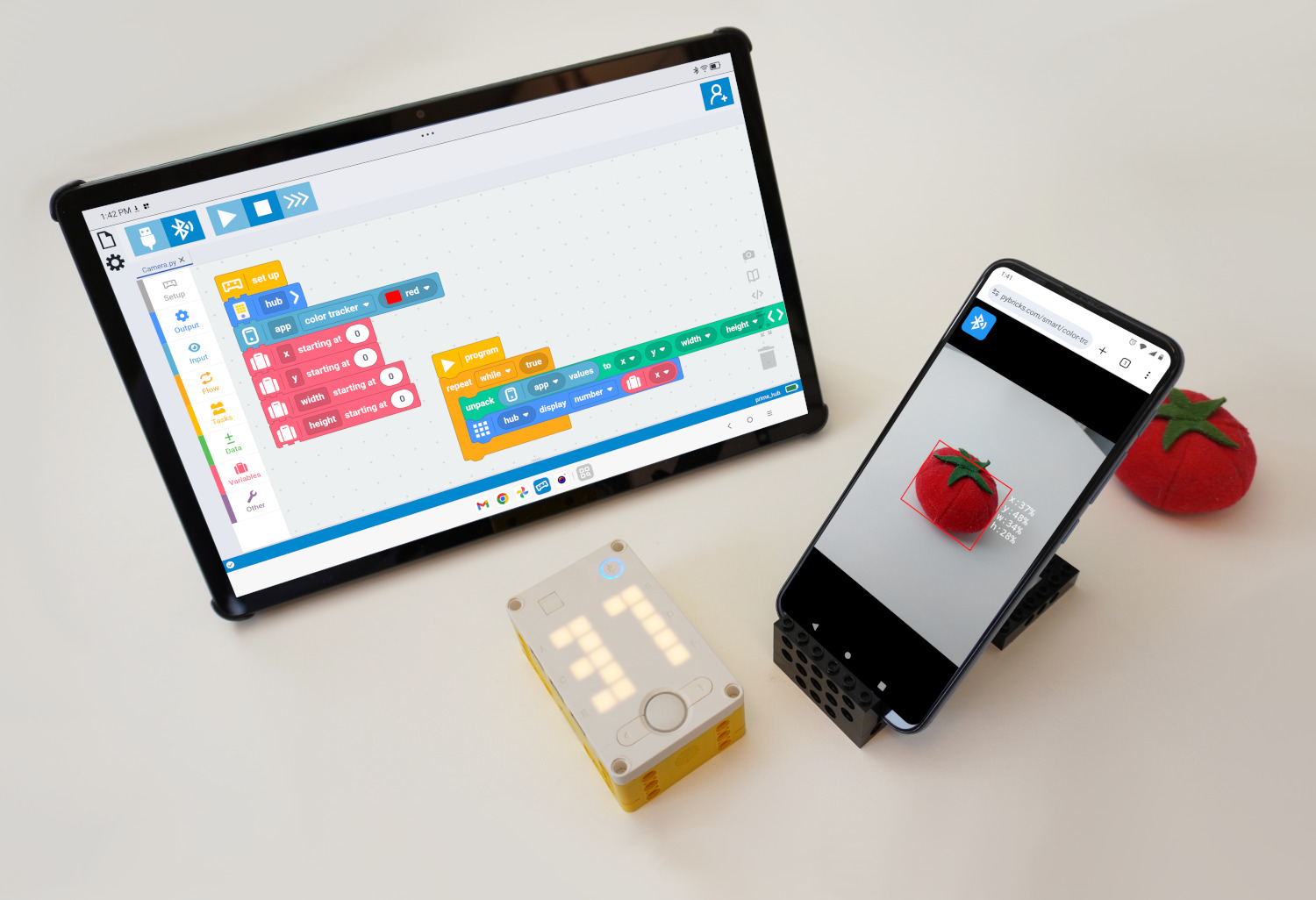
Now that your computer and phone are both connected to the hub, let’s run the example program shown below.
If you hold a red object in front of your phone, your hub displays the horizontal (x) position, as demonstrated in the video above.
The App Data Setup block lets you specify which smart sensor you’ll use on your phone. This way your robot knows what values to expect. The App Data Values block gives you a list of measured values.
The color tracker that you just tried gives a list of four values:
- x-coordinate: Horizontal position, from the left.
- y-coordinate: Vertical position, from the top.
- width of the bounding box.
- height of the bounding box.
All values are percentages (0 to 100%) of the longest side of the camera picture. If there isn’t any matching colored object, you’ll get all zeros. If there are multiple, you’ll get the biggest object.
You can use the elements of the list directly with list blocks, or unpack them into variables to keep things easy to follow.
Following a colored object
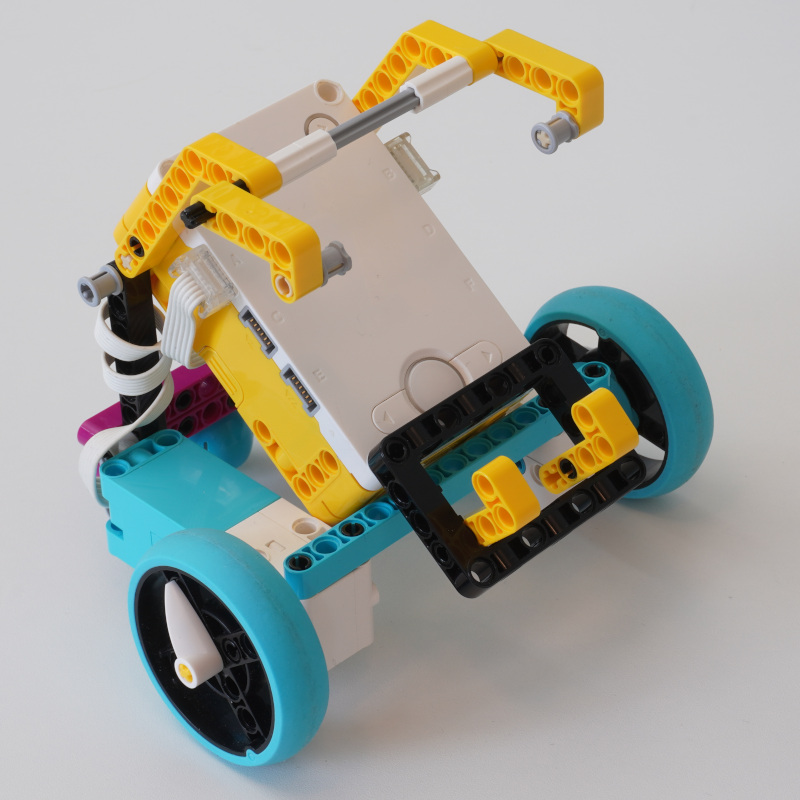
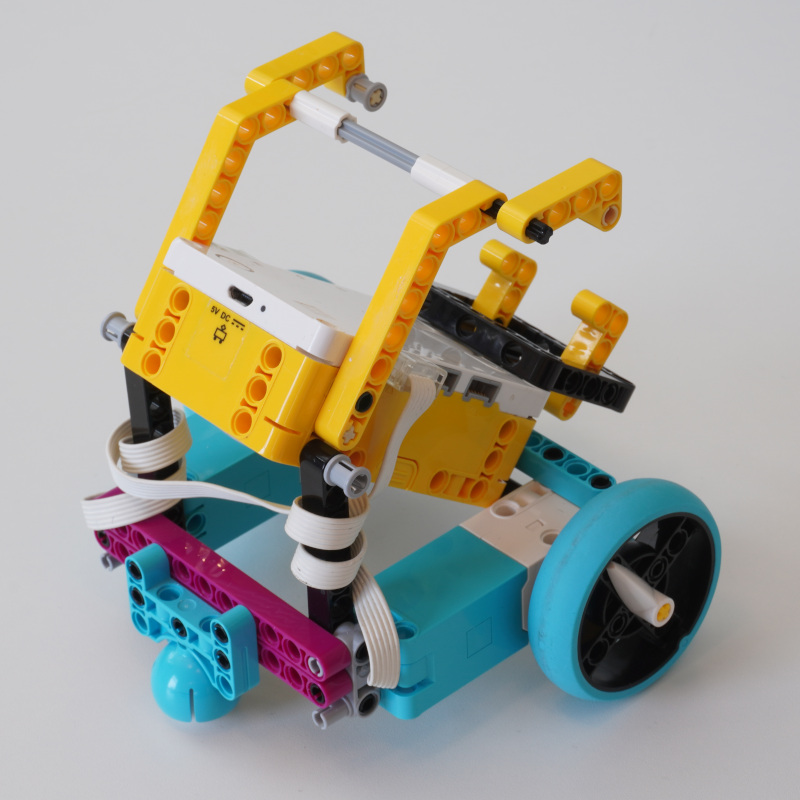
You can use the position and size information to follow a colored object by placing your phone on a robot:
You can build your own robot or use the StarterBot and add a phone holder as shown below. If your phone is larger, use a longer axle at the center, and use the yellow angled beams to hold it in place.

The color tracking program is mostly the same as before, but we’ve added drive blocks for three behaviors:
- If we don’t see the colored object, rotate in place.
- If we see it up close, stop.
- Otherwise, drive at constant speed and adjust steering to steer towards it.
Because the camera faces the other way with this design, we’ll consider that the front of the robot. This is why the motor settings are reversed compared to the conventional StarterBot programs.
Using other smart sensors
You can try various smart sensors. The connection procedure is the same in all cases. The only difference is in the values that your program receives. Use the menu on the left for details on each of the available sensors.
Using other hubs (Optional)
The smart sensor technique works best with SPIKE Prime and MINDSTORMS Robot Inventor. They can easily connect to your computer and your phone at the same time. You can connect with USB too, if you prefer. For other hubs, read on.
SPIKE Essential
This hub works almost the same, but it doesn’t have a Bluetooth button on the hub. So the procedure is slightly different:
- Turn on the hub. The Bluetooth light blinks.
- Using your phone, choose a smart sensor and connect with Bluetooth.
- Now use USB to connect to your computer to write and run programs.
Technic and City
Technic Hub and City Hub support only one Bluetooth connection and they don’t have a USB port, but you can still make it work:
- Connect with Bluetooth as usual and run the program.
- Turn the hub off. This way you disconnect and the program remains saved.
- Turn the hub on. Using your phone, choose a smart sensor and connect with Bluetooth.
- Use the green button on the hub to start your saved program.
So everything works the same; it is just more cumbersome to change your program. This technique does not work on the Boost Move Hub, which does not have enough memory for this feature.
Using Python (optional)
If you prefer to use Python, you can use the following example as a starting point. It’s the same as the block program.
First, initialize the AppData class from the pybricks.tools module.
Pass a format string
to it, which represents the data for the smart sensor you choose. For the color
tracker in this example, we receive 4 bytes, so the format is bbbb.
Obtain the most recently received values using the get_values() method.
Some smart sensors allow you to send a configuration command. For
the color tracker, you can send a single byte representing half of the hue of
the requested color. For dark blue (hue = 220 degrees), you would send 110.
from pybricks.hubs import PrimeHub
from pybricks.parameters import Color
from pybricks.tools import AppData
# Set up.
hub = PrimeHub()
app = AppData('bbbb')
app.write_bytes(bytes([Color.RED.h // 2]))
x = 0
y = 0
width = 0
height = 0
# The main program starts here.
while True:
# First we unpack the list of coordinates from the phone into our variables.
x, y, width, height = app.get_values() or [0] * 4
# Display the x position on the display for easy testing.
hub.display.number(x)