What do you need?
Put simply, you’ll need a LEGO hub, elements to build a robot, and a computer or tablet to create programs. This page helps you find everything you need. For each of these requirements, you’ll have several options to choose from.

Tip: If you’ve worked with SPIKE Prime (45678) or MINDSTORMS (51515) before, you’ll have everything you need. Still, read on to get a good overview of the required components. You’ll find other more budget friendly options below too.
Choosing a device for programming
You can create programs on Windows 10 or 11, macOS, Linux, Android, or ChromeOS. You can use a PC, laptop or tablet. Phones work too, but they are often too small to be useful.
Almost all modern laptops and tablets have builtin Bluetooth support. If your device does not support Bluetooth or if it does not work well, you can buy a low cost USB Bluetooth dongle. If you use SPIKE Prime, SPIKE Essential, or MINDSTORMS Robot Inventor, you’ll also need a USB cable (microUSB) to install the Pybricks firmware.
You’ll also need a browser with Bluetooth support. We recommend using Google Chrome or Microsoft Edge. If you prefer open source tools, you can use Chromium.
Note that the Apple iPad and iPhone are not supported, because the iOS Safari browser and Chrome for iOS do not support Bluetooth connectivity. Similarly, Firefox does not support Bluetooth on any platform.
Choosing a LEGO hub
You can learn to code with Pybricks using any of the hubs shown below. Since many LEGO apps support just one kind of hub, that hub is usually just called “the hub”. This can be a bit confusing, so we’ll use the indicated names consistently throughout this user guide when required.
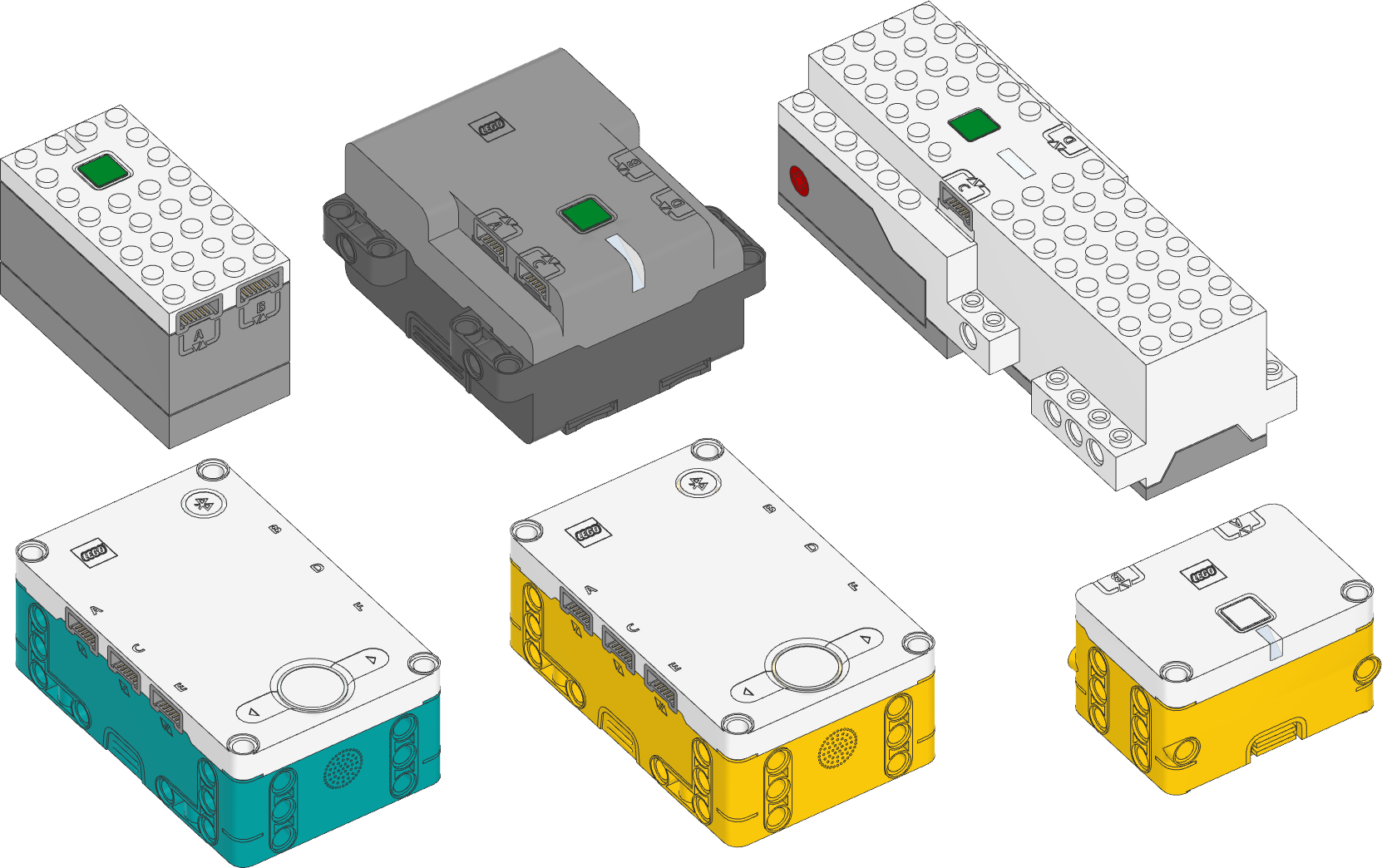
Because Pybricks makes the coding interface the same for all hubs, you can select a hub based on your budget and needs for your own project. The differences are outlined below.
You’ll use just two motors for most of the example projects in this introductory guide, so any hub will do.
| Prime hub* Inventor hub | Essential hub | Technic hub | City Hub | BOOST Move Hub | |
|---|---|---|---|---|---|
| MicroPython coding | ✅ | ✅ | ✅ | ✅ | ✅ |
| Block-based coding | ✅ | ✅ | ✅ | ✅ | ✅ |
| Motor/sensor ports | 6 | 2 | 4 | 2 | 2 ports + 2 builtin motors |
| Buttons | 4 | 1 | 1 | 1 | 1 |
| Battery | Builtin | Builtin | 6 AA | 6 AAA | 6 AAA |
| Display | 5x5 Lights | ❌ | ❌ | ❌ | ❌ |
| Speaker | Beeps only | ❌ | ❌ | ❌ | ❌ |
| Color status light | ✅ | ✅ | ✅ | ✅ | ✅ |
| Accelerometer | ✅ | ✅ | ✅ | ❌ | ✅ |
| Gyro | ✅ | ✅ | ✅ | ❌ | ❌ |
| Powered Up motors | ✅ | ✅ | ✅ | ✅ | ✅ |
| Powered Up sensors | ✅ | ✅ | ✅ | ✅ | ✅ |
| Powered Up Remote | ✅ | ✅ | ✅ | ✅ | ✅ |
| Hub-to-hub communication | ✅ | ✅ | ✅ | ✅ | ✅ |
| Xbox controller | ✅ | ✅ | ✅ | ❌ | ❌ |
| Math with decimals or random numbers | ✅ | ✅ | ✅ | ✅ | ❌ |
| Total storage** | 256Kb | 256Kb | 16Kb | 16Kb | 4Kb |
| Total RAM*** | 320Kb | 320Kb | 64Kb | 32Kb | 16Kb |
| User data storage | 512b | 512b | 128b | 128b | 128b |
(*) The SPIKE Prime Hub and MINDSTORMS Robot Inventor Hub are identical, except for the casing color and a device number to tell them apart. With Pybricks, they work the same. The official apps only connect to hubs with the correct color.
(**) The storage is also the maximum size of your program. Technically, the Prime Hub, Inventor Hub and Essential Hub have more storage space than this. This is not used by Pybricks, so that any files you had on it originally remain untouched.
(***) Working memory holds a copy of your program and system variables. The remainder is available for variables in your own code.
Choosing motors
Motors make your creations move. There are two types: motors that can measure their position and motors that can’t.
Motors that can measure their position are very suitable for robotics applications. You’ll need a pair of them to follow along with this guide.
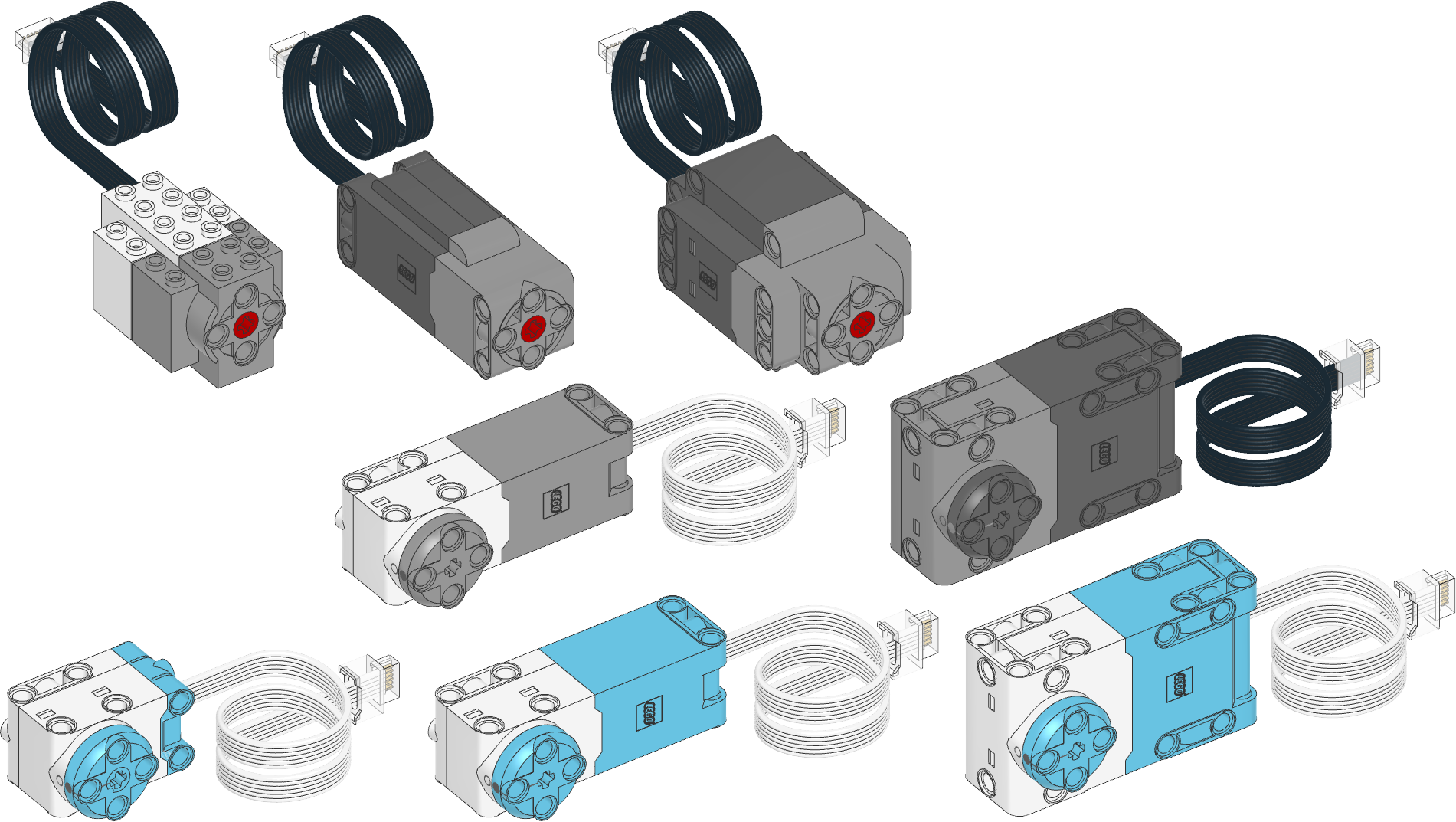
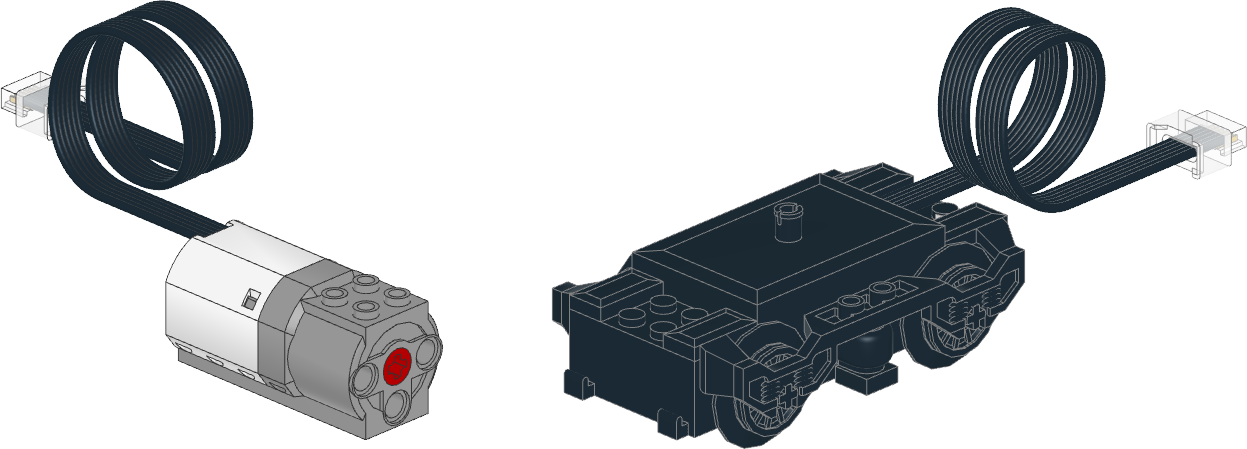
Motors that can’t measure their position can still be useful in some cases due to their unique shape, such as the train engine.
If you’re a train builder, we recommend that you follow this guide with one of the motors shown above first, and resume building with your train motors when you’ve mastered the essential coding techniques. Most of it will still apply!
Choosing sensors
Sensors make your creation aware of its surroundings. Your robot can then respond to different measurements. For example, a vehicle could choose to turn around if it sees an obstacle.
Measuring distance is the simplest way to get familiar with sensors. To follow along with this guide, you can pick any of the sensors below that can measure relative distance (0% to 100%) or actual distance (mm).
We’ll also have a dedicated chapter for color measurement, calibration, and line following. You can skip it if you do not have any color sensors.
| Device | Measurement or function | |
|
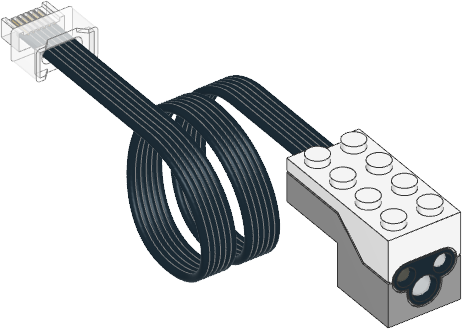
Tilt Sensor (45305) |
|
|
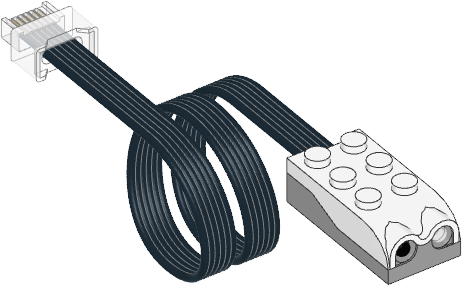
Infrared Sensor (45304) |
|
|
Color and Distance Sensor (88007) |
|
|
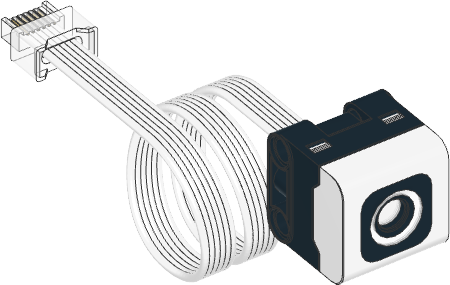
Color Sensor (45605) |
|
|
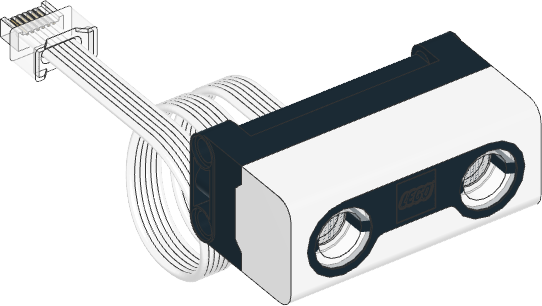
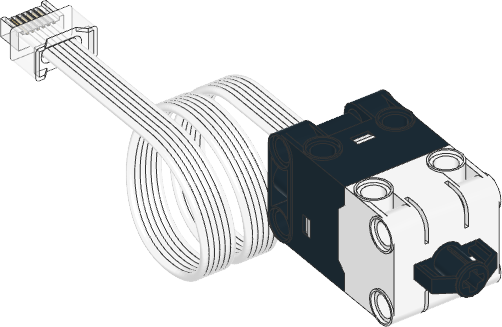
Ultrasonic Sensor (45604) |
|
|
Force Sensor (45606) |
|
Technic building pieces
In this guide, you’ll build a small robot vehicle consisting of a hub, two motors, and a sensor. You’ll need a small amount of Technic pieces to put this all together.
If you have any SPIKE, Technic, or MINDSTORMS set, you should have more than enough pieces. You’ll find step by step instructions for a few suggested designs in the next chapter.
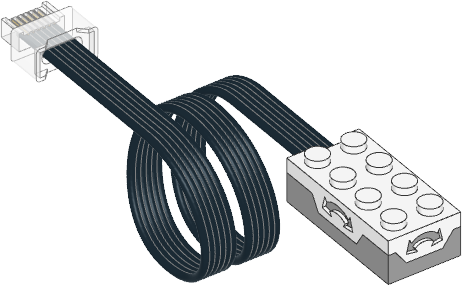
Lights (optional)
Lights can be used to decorate your design or indicate useful information about what your code is doing. Each hub also has a builtin light that can be used for this purpose.
| Device | Function | |
|
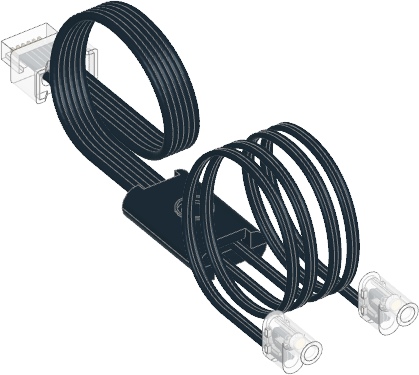
Light (88005) |
|
|
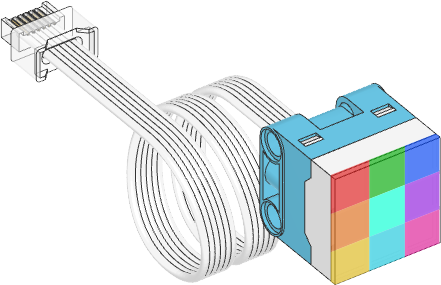
Color Light Matrix (45608) |
|
Remote control (optional)
A remote can be a fun way to augment your autonomous creation. It also lets you conveniently test the mechanics of your design before diving into more elaborate programs.
With Pybricks you are not limited to predefined remote configurations. Instead, you can think of these remotes as wireless sensors. You can measure button presses or joystick position, and you decide what happens based on those inputs.
| Device | Measurement or function | |
|
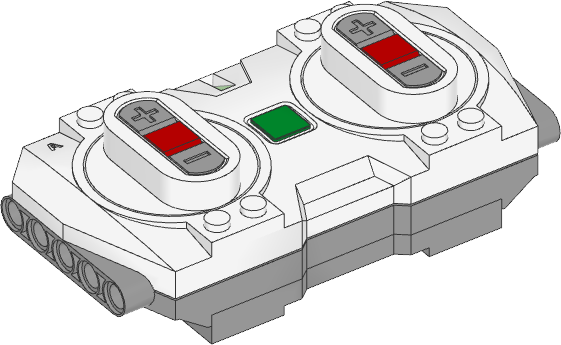
LEGO Powered Up Remote (88010) |
|

|
Xbox Controller
or Xbox Elite Series 2 Controller |
|