Advanced multitasking
This section covers several more advanced uses of the Multitask block. You don’t need these techniques for most programs, but they can be powerful and help simplify your code in certain situations.
Multitasking until one task is done
In the previous section, all Multitask blocks were configured to keep running until all tasks (stacks of blocks) placed in them had completed. Instead, you can make the Multitask block do things simultaneously until one task is done—whichever completes first.
This technique is useful for doing something in the background while you wait for something else to finish, as shown in the following program.
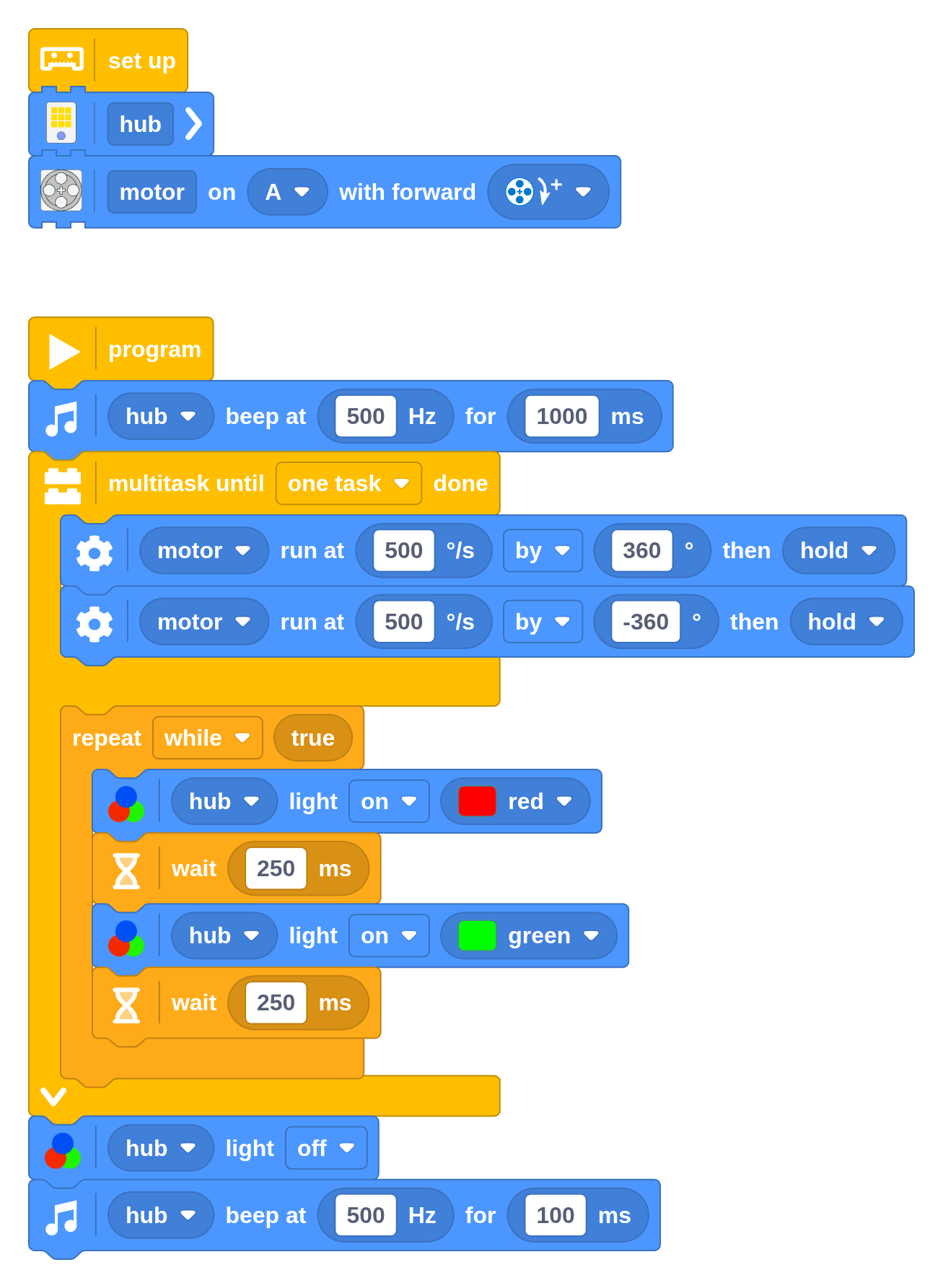
As before, the Multitask block will run the motor back and forth while at the same time blinking the light. The light is set to blink forever, but the Multitask block stops as soon as one task completes. So it stops when the motor finishes moving back and forth. Then the Multitask block takes care of stopping the other stack too, so the light stops blinking. Your program then continues to run the blocks after the Multitask block, so you hear the sound. The light has stopped blinking, but it is still red or green at this point. This example adds a block to turn the light off.
This example may not seem very convincing, but this technique becomes very useful when used with sensors. You can wait on two or more sensors at the same time, but stop waiting as soon as one of them triggers. You’ll learn to do this in the next chapter.
When tasks are cancelled
When you configure the Multitask block to run until only one task completes, it will cancel its remaining tasks that aren’t complete yet. If such a task was waiting on a motor movement to complete, the motor is stopped. The following example does two things simultaneously:
- Run the motor one rotation and then print “Complete”
- Wait two seconds and then print “I got stuck!”
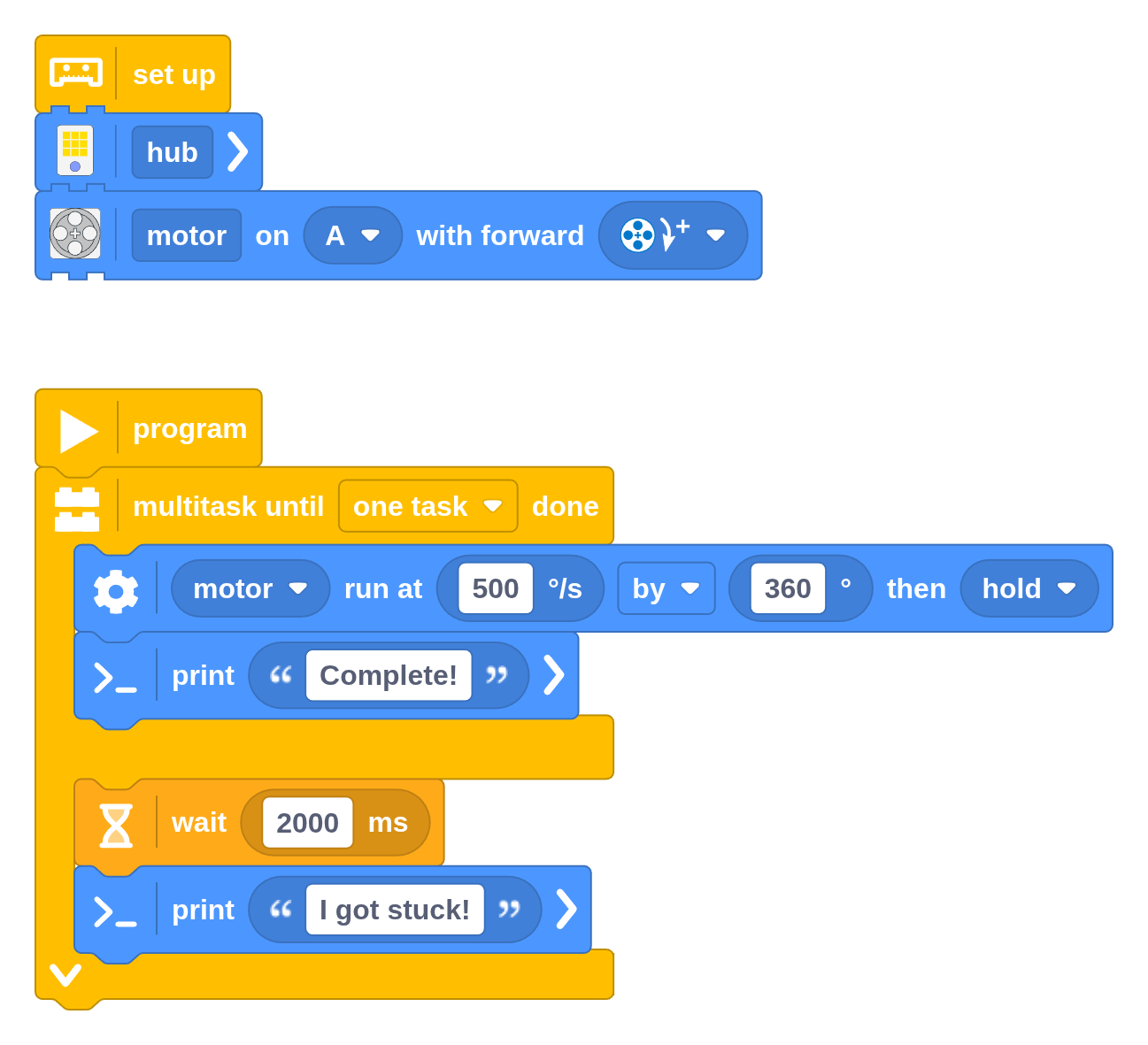
Normally, the motor should complete the rotation in about a second. You’ll see only “Complete!” in the output window. The other task is cancelled in the middle of the Wait block, so you never get the message about being stuck. But if you slow or block the motor with your hands, it won’t be ready after two seconds. So the second task completes first. It will say “I got stuck” and cancel the motor movement in the first task. This can be very useful if you want to move a fixed distance but don’t keep trying forever if you hit a physical endpoint.
Likewise, Wait blocks or Beep blocks are stopped immediately. The stack of blocks then stops running. This is unlike a Repeat block, which always runs until the end. Any other block that doesn’t have to wait on anything is allowed to finish rather than forcefully cancelled. For example, if your code was doing some math to add three numbers, it won’t get cancelled somewhere in the middle. If you’re not entirely sure what gets cancelled or not, you can still control what happens afterward. In the example above, you explicitly turned off the light.
Challenge #4.4.A: Backing up! ⸺ Create a program similar to the example above, but make a drive base drive backwards for 250 mm instead of turning a single motor. The robot should back up by 250 mm but stop trying if it doesn’t get there in two seconds. Discuss ⸺ When is this technique useful in robotics competitions? How is this different from just driving in reverse for two seconds? What are the pros and cons of either approach?
Nested Multitask blocks
The Multitask block can be used like any other block, which means that it can also be placed within another Multitask block, as shown below.
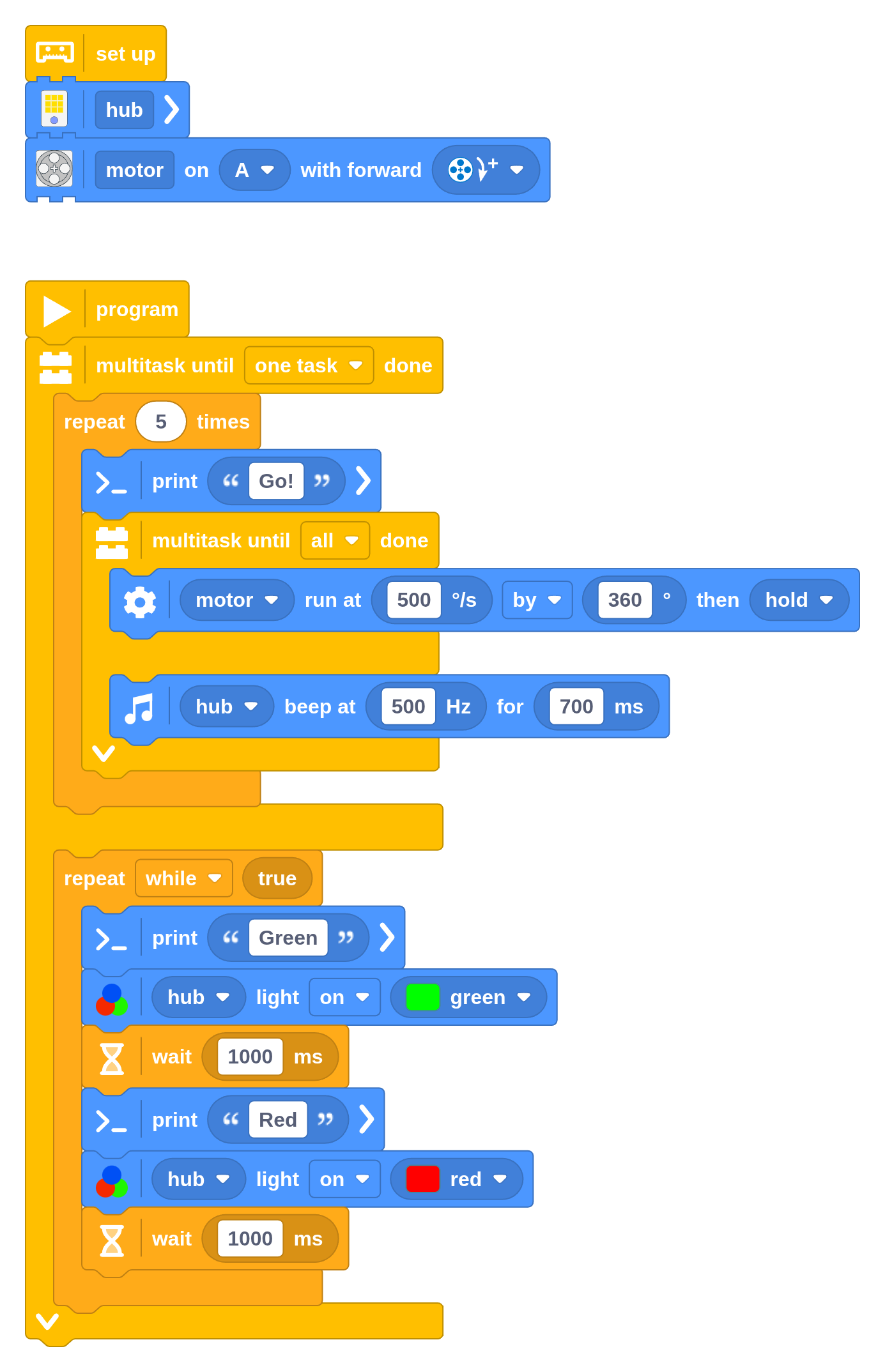
Challenge #4.4.B: Everything at once ⸺ Analyze the example above before you run it. What will it do? Can you definitively say which order the printed messages will be in? If not, what does it depend on? Is it possible to use multiple Start blocks instead of Multitask blocks? If not, how close can you get to the same output? Which differences remain?