LEGO Technic StarterBot
The Technic Hub is internally very similar to the SPIKE Prime Hub. This means you can follow along with almost every lesson without changes.
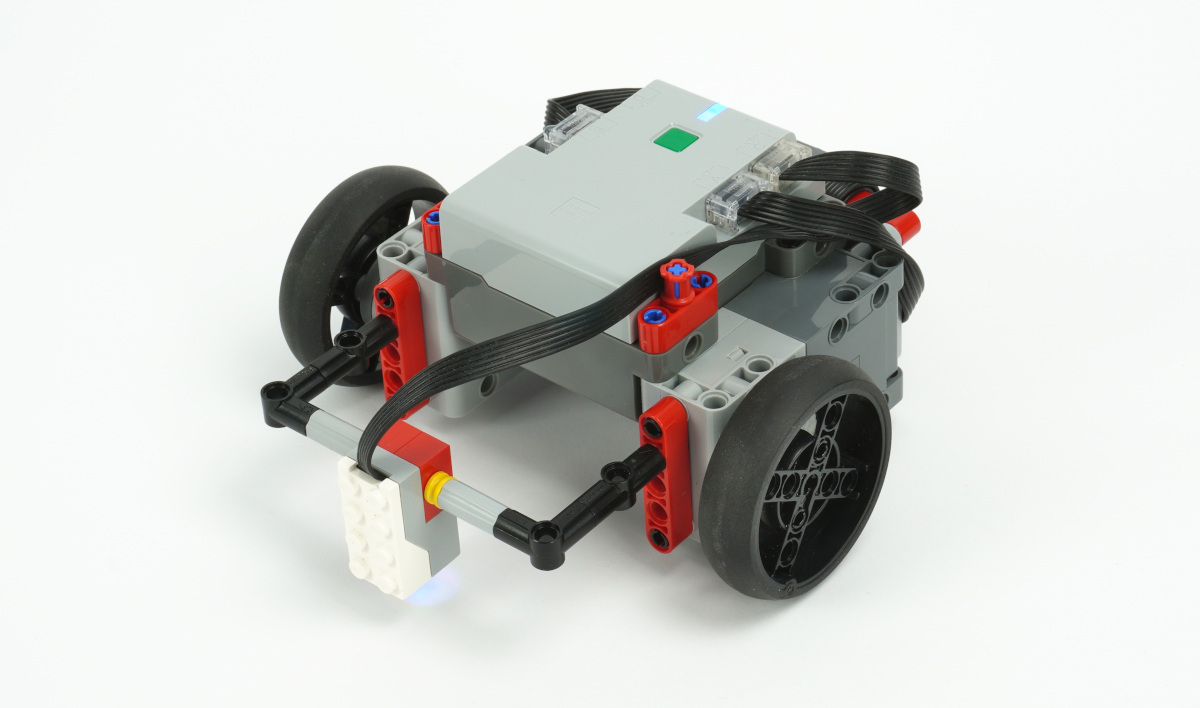
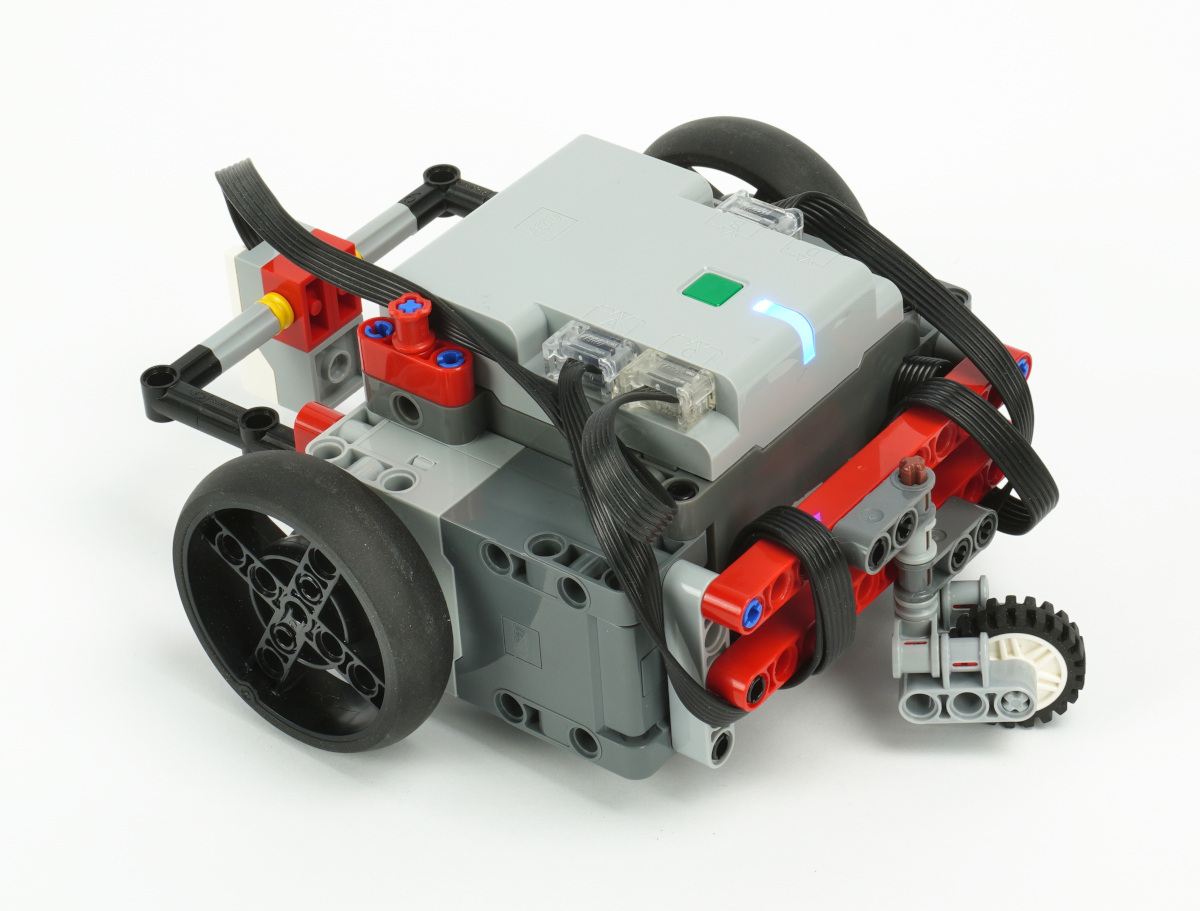
You can build your StarterBot with one Technic Hub, two motors and one or two sensors. This page shows some pictures for inspiration, but you can build something similar with the pieces already in your collection.
Building a base
A robot drive base consists of two wheels, each powered by one motor, and a support wheel in the back. The motors pictured above make it very easy to mount the Technic hub directly on top. If you have other motors, you can use gears to drive the wheels if needed.
You can use any type of wheel. Later on, you’ll set up the code to match the wheel size and width of your robot.

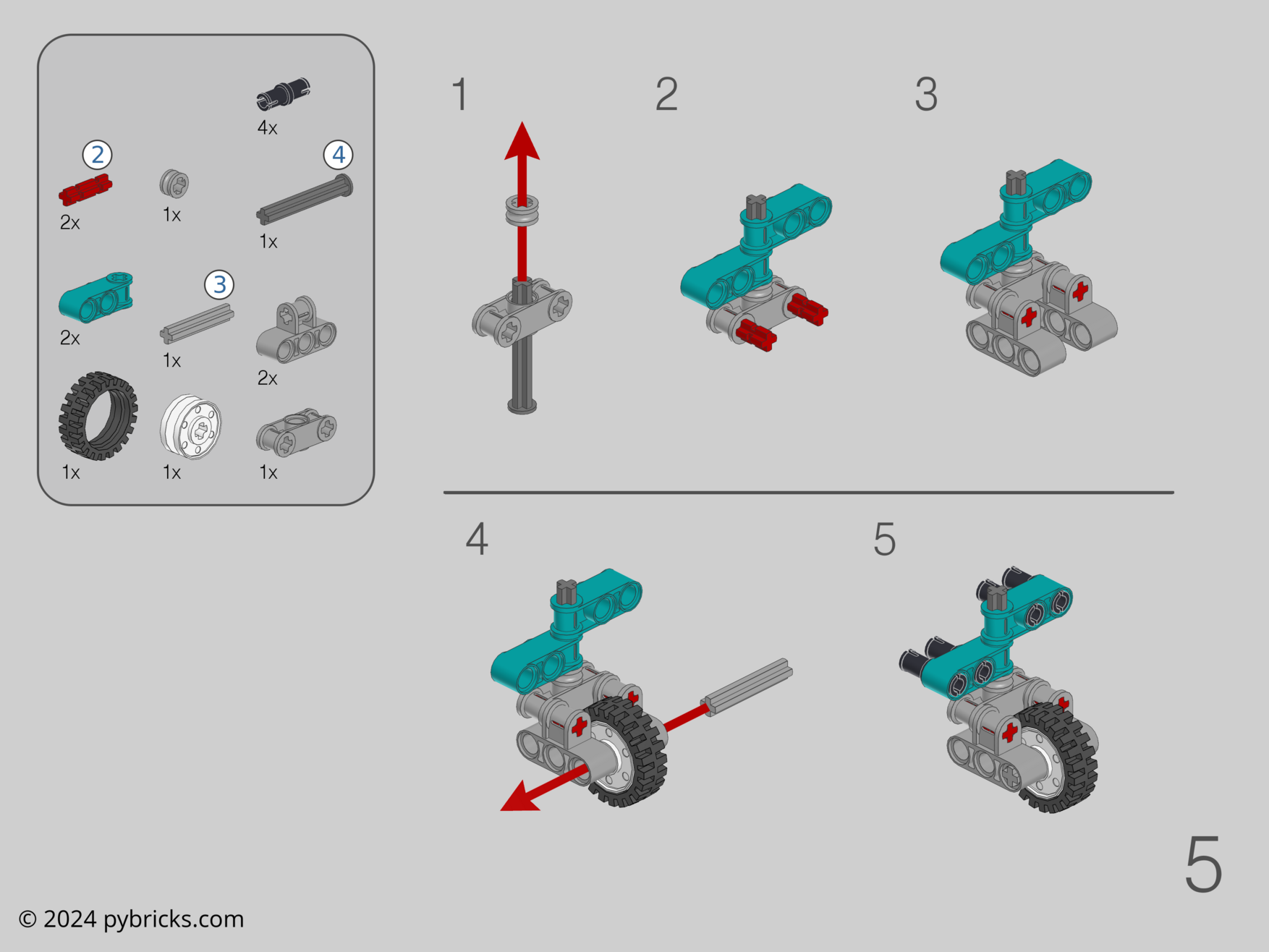
The support wheel
The rear of the robot has to be supported so it can move freely. You could use:
- A swivel wheel as pictured above (see instructions)
- A ball caster (see the SPIKE variant)
- A sliding contact (see the City variant)
{kind=link}
Adding sensors
You can use the same sensors as used on the SPIKE Prime StarterBot if you already have them, but the Color and Distance Sensor (88007) is generally the more affordable option.
It can measure color as well as rough distance, which makes it quite versatile. You can mount it facing downward or forward, depending on the application. You could also use two of these sensors at the same time.
Setup blocks
If you use the design shown above, you can use the following setup blocks in your program. This can be a useful starting point for many of your programs.
Whenever you see code for driving throughout this guide, just use the following parameters instead of the setup blocks used for the default SPIKE robot.
