LEGO City StarterBot
You can build this version of StarterBot with a City Hub and two motors. You can use any kind of motors with rotation sensors.
Adapting the lessons
All coding techniques in this guide also apply to the City Hub. You can use the same code blocks. But since this hub has only two ports, you cannot drive with two motors and use other sensors at the same time.
You can still follow most of the early chapters concerning driving and navigation without many changes. For lessons about sensors, you can modify the examples to use only one motor.
For example, instead of making a robot drive until a colored line, you could make a motor spin until the color sensor detects a certain color. This way, you can still learn about most sensor techniques.
Instructions
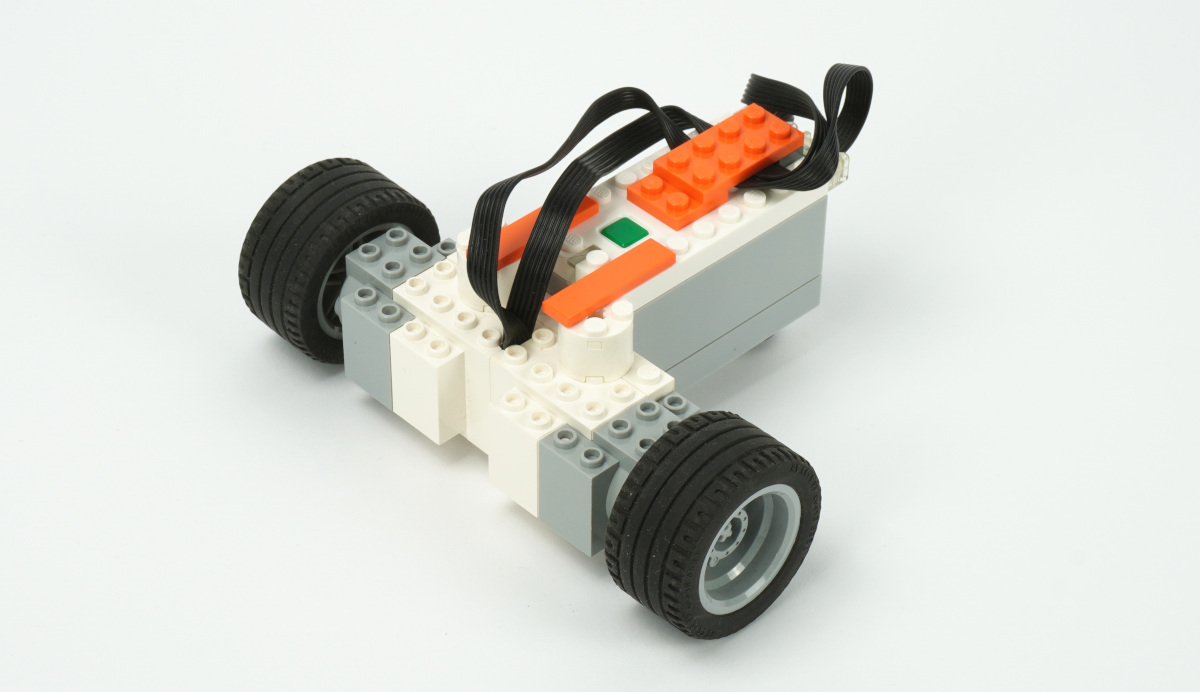
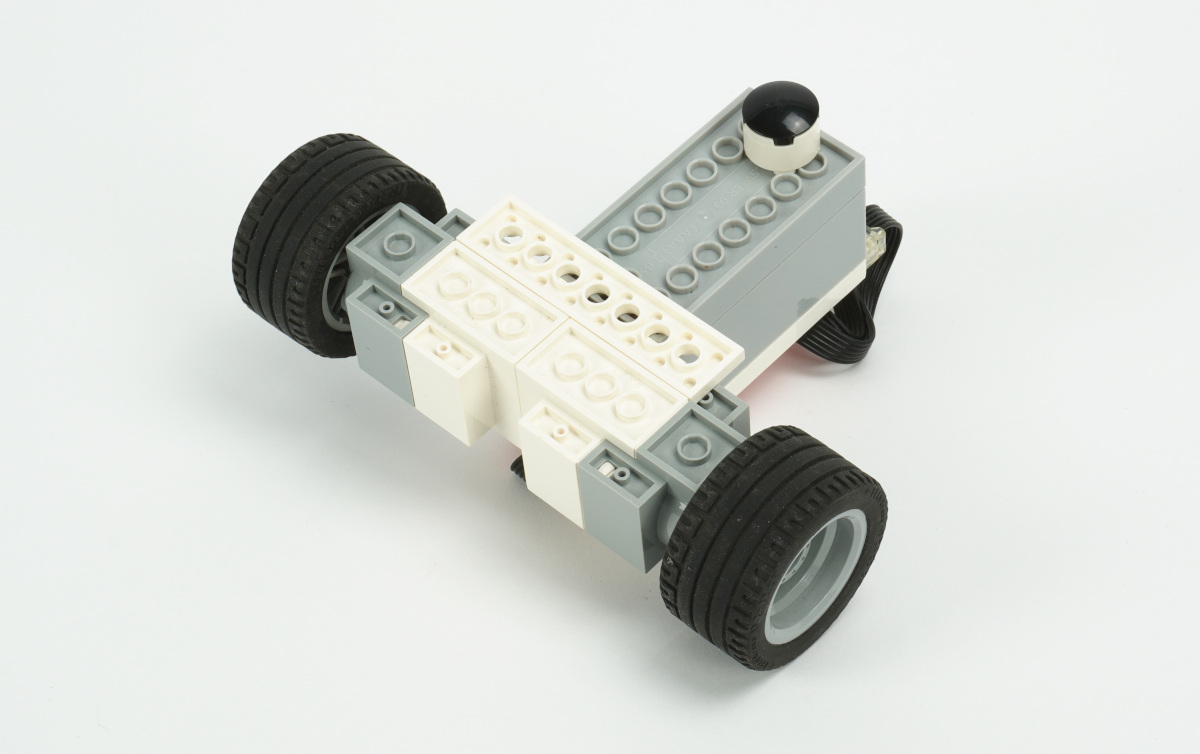
Since everyone is likely to have a different combination of elements, we did not draw step-by-step instructions for this one.
In essence, you just need to connect the two motors to your hub, and add two wheels. You can build a swivel wheel for support or simply use a rounded element as shown here.
Setup blocks
If you use the design shown above, you can use the following setup blocks in your program. This can be a useful starting point for many of your programs.
Whenever you see code for driving throughout this guide, just use the following parameters instead of the setup blocks used for the default SPIKE robot.
