Hand-Controlled Grabber
Python code and building instructions for the LEGO SPIKE Prime SPIKE Prime Core Set (45678).
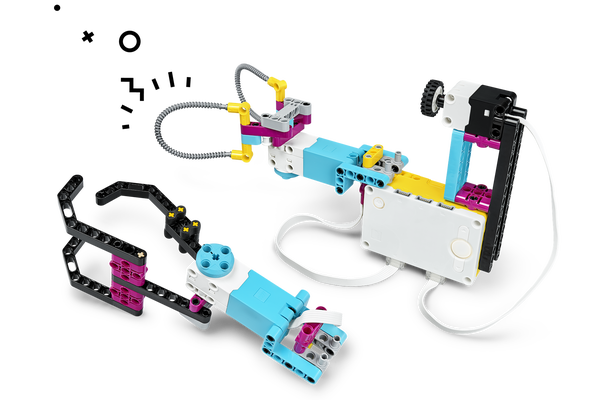
Use the Grabber to pick up objects and bring them around! Press the Force Sensor to grab objects, and release the Force Sensor to let go of them.
This program is for the Hand-Controlled Grabber in the Invention Squad: Super Clean-Up lesson unit.
Program
# Hand-Controlled Grabber:
# press the Force Sensor to grab objects,
# and release the Force Sensor to let go.
from pybricks.hubs import PrimeHub
from pybricks.pupdevices import ForceSensor, Motor
from pybricks.parameters import Port
# Configure the Hub, the Force Sensor and the Motor
hub = PrimeHub()
force_sensor = ForceSensor(Port.E)
motor = Motor(Port.A)
while True:
# Grab when the Force Sensor is pressed
if force_sensor.pressed():
motor.run(speed=-1000)
# else let go
else:
motor.run_until_stalled(speed=1000)
Building instructions
This project was submitted by The Lương-Phạm Family.