Obstacle Avoidance
Python code and building instructions for the LEGO Technic 4X4 X-treme Off-Roader (42099).
Make the truck drive around autonomously using sensors.
Selecting a sensor
This project will work with any sensor that can measure distance.
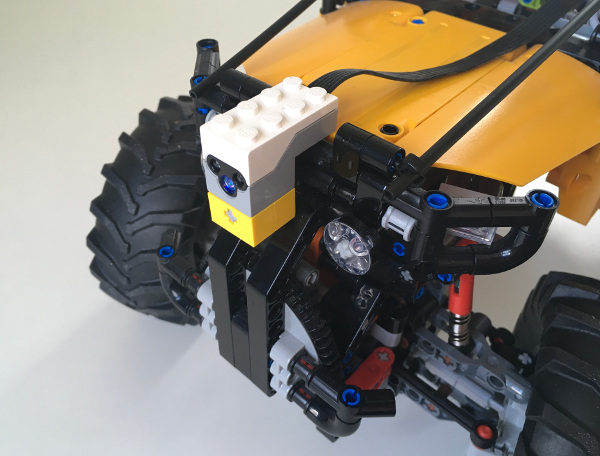
You can use the Color and Distance sensor as in this example, but you can also use the Ultrasonic Sensor or the Infrared Sensor. Mount the sensor somewhere on the front of your truck.
Main program
This program builds on the basic driving example. It makes the truck back up and turn when it detects an obstacle.
from pybricks.pupdevices import Motor, ColorDistanceSensor
from pybricks.parameters import Port, Direction, Stop
from pybricks.tools import wait
# Initialize the motors and sensor.
steer = Motor(Port.C)
# Initialize the motors with increased smoothness profile.
front = Motor(Port.A, Direction.COUNTERCLOCKWISE, profile=360)
rear = Motor(Port.B, Direction.COUNTERCLOCKWISE, profile=360)
sensor = ColorDistanceSensor(Port.D)
# Lower the acceleration so the car starts and stops realistically.
front.control.limits(acceleration=1000)
rear.control.limits(acceleration=1000)
# Find the steering endpoint on the left and right. The difference
# between them is the total angle it takes to go from left to right.
# The middle is in between.
left_end = steer.run_until_stalled(-200, then=Stop.HOLD)
right_end = steer.run_until_stalled(200, then=Stop.HOLD)
# We are now at the right limit. We reset the motor angle to the
# limit value, so that the angle is 0 when the steering mechanism is
# centered.
limit = (right_end - left_end) // 2
steer.reset_angle(limit)
steer.run_target(speed=200, target_angle=0, then=Stop.COAST)
# Given a motor speed (deg/s) and a steering motor angle (deg), this
# function makes the car move at the desired speed and turn angle.
# The car keeps moving until you give another drive command.
def drive(drive_motor_speed, steer_angle):
# Start running the drive motors
front.run(drive_motor_speed)
rear.run(drive_motor_speed)
# Limit the steering value for safety, and then start the steer
# motor.
limited_angle = max(-limit, min(steer_angle, limit))
steer.run_target(200, limited_angle, wait=False)
# Keep driving.
while True:
# Turn around if an obstacle is detected.
if sensor.distance() <= 70:
# Pivot a few times.
for i in range(2):
# Backward left.
drive(-800, -90)
wait(2000)
# Forward right.
drive(800, 90)
wait(1500)
else:
# Otherwise just keep driving forward.
drive(800, 0)
This project was submitted by The Pybricks Team.